The Macrodynamics of an Endogenous Business Cycle Model of Marxist Inspiration
Author
John Cajas Guijarro, Leonardo Vera
Title
The Macrodynamics of an Endogenous Business Cycle Model of Marxist Inspiration
Description
Mathematical supplement to accompany Cajas Guijarro and Vera (2022): https://doi.org/10.1016/j.strueco.2022.08.002
Category
Academic Articles & Supplements
Keywords
Business Cycle, Capital Accumulation, Reserve Army of Labor, Labor Intensity, Complex Dynamical Models
URL
http://www.notebookarchive.org/2022-07-b3n4804/
DOI
https://notebookarchive.org/2022-07-b3n4804
Date Added
2022-07-24
Date Last Modified
2022-07-24
File Size
12.74 megabytes
Supplements
Rights
CC BY-NC-SA 4.0

This file contains supplementary data for John Cajas Guijarro and Leonardo Vera, “The macrodynamics of an endogenous business cycle model of marxist inspiration,” Structural Change and Economic Dynamics, 62, 2022 pp. 566–585. https://doi.org/10.1016/j.strueco.2022.08.002.
(*************************************************************************************************************)(***TheMacrodynamicsofanEndogenousBusinessCycleModelofMarxistInspiration(CajasGuijarroandVera,2022)***)(***************************Source:http://dx.doi.org/10.2139/ssrn.4104317*************************************)(*************************************************************************************************************)
(**Abstract**)(*ThisstudyoffersamodelthatformalizessomeofMarx’sinsightsabouthowcapitalaccumulationgeneratescontradictionsthatmayreproducenever-endingcyclesofboomsandslumps.Themodeltakesthereservearmyoflaborasaregulatorofthedistributionofclass-poweroverthebusinesscyclewithatwo-sidedrole:influencinglaborproductivity,directlythroughtheintensityoflaborandindirectlythroughrealwages.Themodelformsacomplexdynamicalsystemcapabletoyieldtrajectoriesfortheemploymentrate,thewageshare,andtheintensityoflabor.Goodwin(1967)modelmaybeconsideredasaparticularcaseofthemodel.Complexdynamicsmayalsoemergewhenweremovesomekeyassumptionsandexploreandsimulate3-Dversionsofthesystem.Thoughcloseorbitsaroundnon-hyperbolicequilibriumpointscanbeobtained,thepossibilityofunstabledynamicswithincreasingamplitudesinthetradecycleandastructuralcrisiscannotberuledout.*)
In[]:=
ClearAll["Global`*"]
In[]:=
(****Determinantsofcapitalaccumulation****)
In[]:=
eq[2]=k[t]c[t]+ρ*v[t];
In[]:=
eq[3]=c[t]p[t]*A[t];
In[]:=
eq[4]=v[t]w[t]*h*L[t];
In[]:=
eq[5]=Π[t]p[t]*Q[t]-(v[t]+δ*c[t]);
In[]:=
eq[6]=r[t]Π[t]/k[t];
In[]:=
eq[7]=Q[t]q[t]*h*L[t];
In[]:=
eq[8]=m[t]A[t]/L[t];
In[]:=
eq[9]=m'[t]/m[t]γm[t];
In[]:=
eq[10]=q[t]f1[ϵ[t],m[t]];
In[]:=
eq[11]=ω[t]v[t]/(p[t]*Q[t]);
In[]:=
deduction1=Solve[{eq[5],eq[3],eq[4],eq[7],eq[8],eq[11]},{Π[t],c[t],v[t],Q[t],A[t],w[t]}]//FullSimplify
Out[]=
{{Π[t]-L[t]p[t](δm[t]+hq[t](-1+ω[t])),c[t]L[t]m[t]p[t],v[t]hL[t]p[t]q[t]ω[t],Q[t]hL[t]q[t],A[t]L[t]m[t],w[t]p[t]q[t]ω[t]}}
In[]:=
eq[12]=(Solve[deduction1[[1,1,2]]0,ω[t]][[1,1]]//FullSimplify)/.{RuleLess}
Out[]=
ω[t]<1-
δm[t]
hq[t]
In[]:=
eq[13]=k'[t]s*Π[t]-δ*c[t];
In[]:=
eq[14]=γk[t]k'[t]/k[t];
In[]:=
deduction2=Solve[{eq[14],eq[13],eq[6],eq[2],eq[3],eq[4],eq[8],eq[11],eq[7]},{γk[t],k'[t],Π[t],k[t],c[t],v[t],A[t],w[t],Q[t]}]//FullSimplify
Out[]=
γk[t]sr[t]-,[t]L[t]p[t](m[t](-δ+sr[t])+hsρq[t]r[t]ω[t]),Π[t]L[t]p[t]r[t](m[t]+hρq[t]ω[t]),k[t]L[t]p[t](m[t]+hρq[t]ω[t]),c[t]L[t]m[t]p[t],v[t]hL[t]p[t]q[t]ω[t],A[t]L[t]m[t],w[t]p[t]q[t]ω[t],Q[t]hL[t]q[t]
δm[t]
m[t]+hρq[t]ω[t]
′
k
In[]:=
eq[15]=deduction2[[1,1]]/.{RuleEqual}
Out[]=
γk[t]sr[t]-
δm[t]
m[t]+hρq[t]ω[t]
In[]:=
deduction3=Solve[{eq[6],eq[5],eq[7],eq[2],eq[3],eq[4],eq[8],eq[11]},{r[t],Π[t],Q[t],k[t],c[t],v[t],A[t],w[t]}]//FullSimplify
Out[]=
r[t]-,Π[t]-L[t]p[t](δm[t]+hq[t](-1+ω[t])),Q[t]hL[t]q[t],k[t]L[t]p[t](m[t]+hρq[t]ω[t]),c[t]L[t]m[t]p[t],v[t]hL[t]p[t]q[t]ω[t],A[t]L[t]m[t],w[t]p[t]q[t]ω[t]
δm[t]+hq[t](-1+ω[t])
m[t]+hρq[t]ω[t]
In[]:=
eq[16]=deduction3[[1,1]]/.{RuleEqual}
Out[]=
r[t]-
δm[t]+hq[t](-1+ω[t])
m[t]+hρq[t]ω[t]
In[]:=
(****Onthereservearmyoflaboranditsmultipleroles****)
In[]:=
eq[17]=l[t]L[t]/NN[t];
In[]:=
eq[18]=NN'[t]/NN[t]n;
In[]:=
deduction4=Solve[{D[eq[17],t],eq[18],eq[17]},{l'[t],NN'[t],NN[t]}]//FullSimplify
Out[]=
[t]l[t]-n+[t],[t],NN[t]
′
l
′
L
L[t]
′
NN
nL[t]
l[t]
L[t]
l[t]
In[]:=
eq[19]=deduction4[[1,1]]/.{RuleEqual}
Out[]=
′
l
′
L
L[t]
In[]:=
deduction5=Solve[{eq[8],eq[3],eq[2],eq[4],eq[11],eq[7]},{L[t],A[t],c[t],v[t],w[t],Q[t]}]//FullSimplify
Out[]=
L[t],A[t],c[t],v[t],w[t]p[t]q[t]ω[t],Q[t]
k[t]
p[t](m[t]+hρq[t]ω[t])
k[t]m[t]
p[t](m[t]+hρq[t]ω[t])
k[t]m[t]
m[t]+hρq[t]ω[t]
hk[t]q[t]ω[t]
m[t]+hρq[t]ω[t]
hk[t]q[t]
p[t](m[t]+hρq[t]ω[t])
In[]:=
eq[20]=deduction5[[1,1]]/.{RuleEqual}
Out[]=
L[t]
k[t]
p[t](m[t]+hρq[t]ω[t])
In[]:=
deduction6=Solve[{eq[19],D[eq[20],t],eq[20],eq[14],ππ[t]p'[t]/p[t]},{l'[t],L'[t],L[t],k'[t],p'[t]}]//FullSimplify
Out[]=
[t]-l[t](m[t](n-γk[t]+ππ[t])+[t]+hρω[t][t]+hρq[t]((n-γk[t]+ππ[t])ω[t]+[t])),[t],L[t],[t]k[t]γk[t],[t]p[t]ππ[t]
′
l
1
m[t]+hρq[t]ω[t]
′
m
′
q
′
ω
′
L
k[t](m[t](γk[t]-ππ[t])-[t]-hρω[t][t]+hρq[t]((γk[t]-ππ[t])ω[t]-[t]))
′
m
′
q
′
ω
p[t]
2
(m[t]+hρq[t]ω[t])
k[t]
p[t](m[t]+hρq[t]ω[t])
′
k
′
p
In[]:=
eq[21]=Collect[deduction6[[1,1]],{l[t],-γk[t],n,ππ[t]}]/.{RuleEqual}
Out[]=
′
l
′
m
′
q
′
ω
m[t]+hρq[t]ω[t]
In[]:=
eq[22]=(w'[t]/w[t]-ππ[t])-α11+α12*l[t]-α13*ππ[t];
In[]:=
eq[23]=ππ[t]α21+α22*l'[t]/l[t]+α23*((w'[t]/w[t])-(q'[t]/q[t]));
In[]:=
eq[24]=ϵ'[t]/ϵ[t]α31-α32*l[t]+α33*(m'[t]/m[t])-α34*ϵ[t]+α35*((w'[t]/w[t])-ππ[t]);
In[]:=
(****Interpretingsomecomplexdynamics****)
In[]:=
deduction7a=Solve[{eq[11],eq[4],eq[7]},{ω[t],v[t],Q[t]}];
In[]:=
deduction7b=deduction7a[[1,1]]/.{RuleEqual}
Out[]=
ω[t]
w[t]
p[t]q[t]
In[]:=
deduction7c=Solve[{eq[21],eq[23],eq[15],eq[16],deduction7b,D[deduction7b,t],ππ[t]p'[t]/p[t]},{l'[t],ππ[t],γk[t],r[t],w[t],w'[t],p'[t]}]//FullSimplify;
In[]:=
eq[25]=Collect[deduction7c[[1,1]]/.{RuleEqual},{l[t],(-1+α23)}]
Out[]=
′
l
(-1+α23)(nm[t]ω[t]+(1+s)δm[t]ω[t]+hsq[t]+ω[t]([t]+hρω[t][t]))
2
ω[t]
′
m
′
q
(1+α22-α23)ω[t](m[t]+hρq[t]ω[t])
2
ω[t]
2
ω[t]
′
ω
In[]:=
manualeq[25]=l'[t]l[t]*((1-α23)/(1+α22-α23))*(s*((h*(1-ω[t])*q[t]-δ*m[t])/(m[t]+ρ*h*ω[t]*q[t]))-(n+(1/(1-α23))*(α21+α23*ω'[t]/ω[t])+(δ*m[t]+m'[t]+ρ*h*(q[t]*ω'[t]+q'[t]*ω[t]))/(m[t]+ρ*h*ω[t]*q[t])));
In[]:=
(eq[25][[2]]-manualeq[25][[2]])//Simplify
Out[]=
0
In[]:=
deduction8=Solve[{eq[22],D[deduction7b,t],deduction7b,ππ[t]p'[t]/p[t],eq[23]},{ω'[t],w'[t],w[t],p'[t],ππ[t]}]//FullSimplify;
In[]:=
eq[26]=deduction8[[1,1]]/.{RuleEqual}
Out[]=
′
ω
′
l
′
q
In[]:=
manualeq[26]=ω'[t]ω[t]*((1-α23)/(1-α23*(1-α13)))*(-α11+α12*l[t]-q'[t]/q[t]-(α13/(1-α23))*(α21+α22*l'[t]/l[t]));
In[]:=
(eq[26][[2]]-manualeq[26][[2]])//Simplify
Out[]=
0
In[]:=
deduction9=Solve[{eq[24],D[deduction7b,t],deduction7b,ππ[t]p'[t]/p[t]},{ϵ'[t],w'[t],w[t],ππ[t]}]//FullSimplify;
In[]:=
eq[27]=Collect[deduction9[[1,1]]/.{RuleEqual},{ϵ[t],α35}]
Out[]=
′
ϵ
2
ϵ[t]
α33[t]
′
m
m[t]
′
q
q[t]
′
ω
ω[t]
In[]:=
eq[28]=eq[9]
Out[]=
′
m
m[t]
In[]:=
(*****************************************************************)(*****************************ModelA****************************)(*****************************************************************)
In[]:=
caseA={s1,h1,δ0,ρ0,q[t]α40*ϵ[t]*m[t],q'[t]α40*(ϵ'[t]*m[t]+ϵ[t]*m'[t]),α210,α220,α230,α310,α320,α330,α340,α350,ϵ'[t]0,m'[t]m[t]*γm,ϵ[t]ϵ};
In[]:=
{eq[31],eq[32]}=FullSimplify[Solve[({eq[25],eq[26]}/.caseA)/.caseA,{l'[t],ω'[t]}]][[1]]/.{RuleEqual}
Out[]=
{[t]-l[t](n+γm-α40ϵ+α40ϵω[t]),[t]-(α11+γm-α12l[t])ω[t]}
′
l
′
ω
In[]:=
(*ModelA:Equilibrium*)
In[]:=
eq[33]=FullSimplify[Solve[{eq[31],eq[32]}/.{l'[t]0,ω'[t]0},{l[t],ω[t]}]][[2]]/.{RuleEqual}
Out[]=
l[t],ω[t]-
α11+γm
α12
n+γm-α40ϵ
α40ϵ
In[]:=
(*ModelA:Stability*)
In[]:=
jacobianA=D[{eq[31][[2]],eq[32][[2]]},{{l[t],ω[t]}}]/.(eq[33]/.{EqualRule})
Out[]=
0,-,-,0
α40(α11+γm)ϵ
α12
α12(n+γm-α40ϵ)
α40ϵ
In[]:=
eq[34]={τATr[jacobianA],ΔADet[jacobianA]}//FullSimplify
Out[]=
{τA0,ΔA+(α11+γm)(n+γm-α40ϵ)0}
In[]:=
(*ModelA:Numericalsimulations*)
In[]:=
simulationA1={ϵ1,n0.08,γm0,α110.4,α120.8,α400.2};
In[]:=
simulationA2={ϵ1.25,n0.08,γm0,α110.4,α120.8,α400.2};
In[]:=
solutionA1=NDSolve[{eq[31],eq[32],l[0]0.5,ω[0]0.5}/.simulationA1,{l,ω},{t,0,2000}];
In[]:=
solutionA2=NDSolve[{eq[31],eq[32],l[0]0.5,ω[0]0.5}/.simulationA2,{l,ω},{t,0,2000}];
In[]:=
sollA1=solutionA1[[1,1,2]];
In[]:=
solωA1=solutionA1[[1,2,2]];
In[]:=
sollA2=solutionA2[[1,1,2]];
In[]:=
solωA2=solutionA2[[1,2,2]];
In[]:=
(*ModelA:2DParametricplot*)
In[]:=
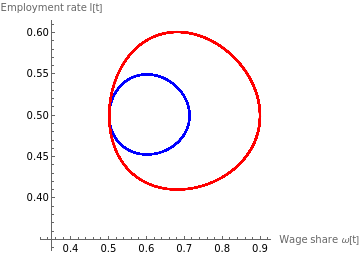
figure1=ParametricPlot[{{solωA1[t],sollA1[t]},{solωA2[t],sollA2[t]}},{t,0,2000},AspectRatio1,AxesLabel{"Wage share ω[t]","Employment rate l[t]"},PlotLegends{"ϵ=1 (A: No inflation)","ϵ=1.25 (A: No inflation)"},AxesOrigin{0.35,0.35},PlotStyle{Blue,Red}]
Out[]=
 |
|
In[]:=
(*ModelA:Trajectories*)
In[]:=
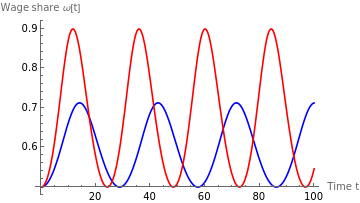
figureB11=Plot[{solωA1[t],solωA2[t]},{t,0,100},AxesLabel{"Time t","Wage share ω[t]"},PlotLegends{"ϵ=1 (A: No inflation)","ϵ=1.25 (A: No inflation)"},PlotStyle{Blue,Red}]
Out[]=
 |
|
In[]:=
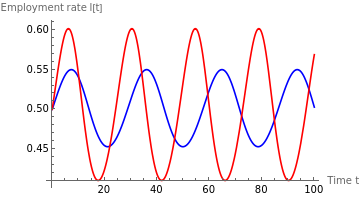
figureB12=Plot[{sollA1[t],sollA2[t]},{t,0,100},AxesLabel{"Time t","Employment rate l[t]"},PlotLegends{"ϵ=1 (A: No inflation)","ϵ=1.25 (A: No inflation)"},PlotStyle{Blue,Red}]
Out[]=
 |
|
In[]:=
(*****************************************************************)(*****************************ModelB****************************)(*****************************************************************)
In[]:=
caseB={s1,h1,δ0,ρ0,q[t]α40*ϵ[t]*m[t],q'[t]α40*(ϵ'[t]*m[t]+ϵ[t]*m'[t]),α310,α320,α330,α340,α350,ϵ'[t]0,m'[t]m[t]*γm,ϵ[t]ϵ};
In[]:=
{eq[35],eq[36]}=FullSimplify[Solve[({eq[25],eq[26]}/.caseB)/.caseB,{l'[t],ω'[t]}]][[1]]/.{RuleEqual}
Out[]=
[t](-l[t](n+α21-α11α23+n(-1+α13)α23+γm+(-2+α13)α23γm+(-1+α23-α13α23)α40ϵ+α12α23l[t])+(-1+α23-α13α23)α40ϵl[t]ω[t]),[t]ω[t](-α13α21+α11(-1-α22+α23)+(-1-α22+α23)γm+α13α22(n+γm-α40ϵ)+α12(1+α22-α23)l[t]+α13α22α40ϵω[t])
′
l
1
1+α22+(-1+α13)α23
′
ω
1
1+α22+(-1+α13)α23
In[]:=
(*ModelB:Equilibrium*)
In[]:=
eq[37]=FullSimplify[Solve[{eq[35],eq[36]}/.{l'[t]0,ω'[t]0},{l[t],ω[t]}]][[2]]/.{RuleEqual}
Out[]=
l[t],ω[t]1-
α11+α13α21-α11α23+γm-α23γm
α12-α12α23
n+α21-nα23+γm-α23γm
α40ϵ-α23α40ϵ
In[]:=
(*ModelB:Stability*)
In[]:=
jacobianB=D[{eq[35][[2]],eq[36][[2]]},{{l[t],ω[t]}}]/.(eq[37]/.{EqualRule})//FullSimplify
Out[]=
,,,
α23(α11+α13α21-α11α23+γm-α23γm)
(-1+α23)(1+α22+(-1+α13)α23)
(-1+α23-α13α23)α40(α11+α13α21-α11α23+γm-α23γm)ϵ
(α12-α12α23)(1+α22+(-1+α13)α23)
α12(1+α22-α23)1-
n+α21-nα23+γm-α23γm
α40ϵ-α23α40ϵ
1+α22+(-1+α13)α23
α13α22(n+α21-nα23+γm-α23γm+(-1+α23)α40ϵ)
(-1+α23)(1+α22+(-1+α13)α23)
In[]:=
eq[38]=τBTr[jacobianB]//FullSimplify
Out[]=
τB-((nα13α22(-1+α23)-α13α21(α22+α23)+(-1+α23)α23(α11+γm)+α13α22(-1+α23)(γm-α40ϵ))/((-1+α23)(1+α22+(-1+α13)α23)))
In[]:=
eq[39]=ΔBDet[jacobianB]//FullSimplify
Out[]=
ΔB
(α11+α13α21-α11α23+γm-α23γm)(n+α21-nα23+γm-α23γm+(-1+α23)α40ϵ)
(-1+α23)(1+α22+(-1+α13)α23)
In[]:=
eq[40]=α13B[ϵ](Solve[{eq[38],τB0},{α13,τB}]//FullSimplify)[[1,1,2]]
Out[]=
α13B[ϵ]-
(-1+α23)α23(α11+γm)
nα22(-1+α23)-α21(α22+α23)+α22(-1+α23)(γm-α40ϵ)
In[]:=
eq[41]=ϵB(Solve[{eq[39],ΔB0},{ϵ,ΔB}]//FullSimplify)[[1,1,2]]
Out[]=
ϵB
n+α21-nα23+γm-α23γm
α40-α23α40
In[]:=
(*ModelB:Numericalsimulations*)
In[]:=
simulationB1={ϵ1,n0.08,γm0,α110.4,α120.8,α400.2,α210.01,α220.1,α230.1,α134.09090909};
In[]:=
solutionB1=NDSolve[{eq[35],eq[36],l[0]0.5,ω[0]0.5}/.simulationB1,{l,ω},{t,0,2000}];
In[]:=
sollB1=solutionB1[[1,1,2]];
In[]:=
solωB1=solutionB1[[1,2,2]];
In[]:=
eq[40]/.simulationB1[[2;;10]]
Out[]=
α13B[ϵ]
0.036
-0.0092+0.018ϵ
In[]:=
(*ModelB:stabilityconstraint*)
In[]:=
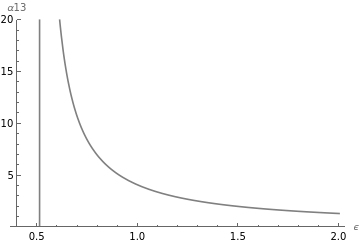
figure2=Plot[eq[40][[2]]/.simulationB1[[2;;10]],{ϵ,0.4,2},PlotRange{0,20},AxesLabel{"ϵ","α13"},PlotStyleGray]
Out[]=
In[]:=
(*ModelAvsModelB:2DParametricplot*)
In[]:=
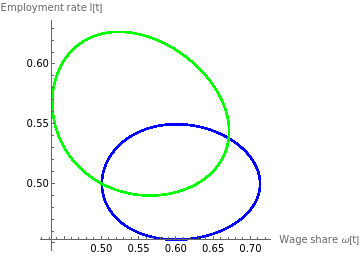
figure3=ParametricPlot[{{solωA1[t],sollA1[t]},{solωB1[t],sollB1[t]}},{t,0,2000},AspectRatio1,AxesLabel{"Wage share ω[t]","Employment rate l[t]"},PlotStyle{Blue,Green},PlotLegends{"ϵ=1 (A: No inflation)","ϵ=1 (B: Endogenous inflation)"}]
Out[]=
 |
|
In[]:=
(*ModelAvsModelB:Trajectories*)
In[]:=
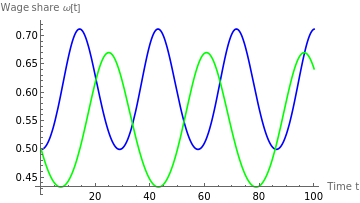
figureB21=Plot[{solωA1[t],solωB1[t]},{t,0,100},AxesLabel{"Time t","Wage share ω[t]"},PlotLegends{"ϵ=1 (A: No inflation)","ϵ=1 (B: Endogenous inflation)"},PlotStyle{Blue,Green}]
Out[]=
 |
|
In[]:=
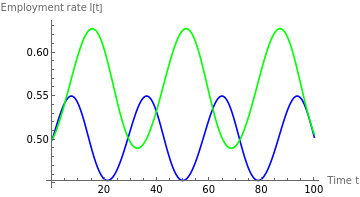
figureB22=Plot[{sollA1[t],sollB1[t]},{t,0,100},AxesLabel{"Time t","Employment rate l[t]"},PlotLegends{"ϵ=1 (A: No inflation)","ϵ=1 (B: Endogenous inflation)"},PlotStyle{Blue,Green}]
Out[]=
 |
|
In[]:=
(*****************************************************************)(*****************************ModelC****************************)(*****************************************************************)
In[]:=
caseC={s1,h1,δ0,ρ0,q[t]α40*ϵ[t]*m[t],q'[t]α40*(ϵ'[t]*m[t]+ϵ[t]*m'[t]),α210,α220,α230,m'[t]m[t]*0,γm0};
In[]:=
{eq[42],eq[43],eq[44]}=FullSimplify[Solve[({eq[25],eq[26],eq[27]}/.caseC)/.caseC,{l'[t],ω'[t],ϵ'[t]}]][[1]]/.{RuleEqual}
Out[]=
{[t]-l[t](n+α40ϵ[t](-1+ω[t])),[t](-α31+α11(-1+α35)+(α12+α32-α12α35)l[t]+α34ϵ[t])ω[t],[t]ϵ[t](α31-α11α35+(-α32+α12α35)l[t]-α34ϵ[t])}
′
l
′
ω
′
ϵ
In[]:=
(*ModelC:Equilibrium*)
In[]:=
eq[45]=FullSimplify[Solve[{eq[42],eq[43],eq[44]}/.{l'[t]0,ω'[t]0,ϵ'[t]0},{l[t],ω[t],ϵ[t]}]][[2]]/.{RuleEqual}
Out[]=
l[t],ω[t]1-,ϵ[t]
α11
α12
nα12α34
α12α31α40-α11α32α40
α12α31-α11α32
α12α34
In[]:=
(*ModelC:Stability(seeAppendixA.1)*)
In[]:=
jacobianC=D[{eq[42][[2]],eq[43][[2]],eq[44][[2]]},{{l[t],ω[t],ϵ[t]}}]/.(eq[45]/.{EqualRule})//FullSimplify
Out[]=
0,α34,,(α12+α32-α12α35)1-,0,α341-,,0,-α31+
α11(-α12α31+α11α32)α40
2
α12
nα11α34
α12α31-α11α32
nα12α34
α12α31α40-α11α32α40
nα12α34
α12α31α40-α11α32α40
(α12α31-α11α32)(-α32+α12α35)
α12α34
α11α32
α12
In[]:=
charpolinomialC=Collect[FullSimplify[CharacteristicPolynomial[jacobianC,λ]],λ]
Out[]=
nα11α31α34-nα12α32α34-α11α40
2
α12
2
α11
2
(α12α31-α11α32)
2
α12
(nα11α34+α11(α12α31-α11α32)(-α32+α12(-1+α35))α40)λ
2
α12
2
α12
(-α12α31+α11α32)
2
λ
α12
3
λ
In[]:=
eqb1C=b1[α32](-Tr[jacobianC]//FullSimplify)
Out[]=
b1[α32]α31-
α11α32
α12
In[]:=
eqb2C=b2[α32](Tr[Minors[jacobianC]]//FullSimplify)
Out[]=
b2[α32]-nα11+α34
α11(-α12α31+α11α32)(-α32+α12(-1+α35))α40
2
α12
In[]:=
eqb3C=b3[α32](-Det[jacobianC]//FullSimplify)
Out[]=
b3[α32]α34
α11(-α12α31+α11α32)(nα12α34-α12α31α40+α11α32α40)
2
α12
In[]:=
eqb123C=b1[α32]*b2[α32]-b3[α32]((eqb1C[[2]]*eqb2C[[2]]-eqb3C[[2]])//FullSimplify)
Out[]=
b1[α32]b2[α32]-b3[α32]-α34
α11(-α32+α12α35)α40
2
(α12α31-α11α32)
3
α12
In[]:=
criticalvalC=Solve[eqb123C[[2]]0,α32]
Out[]=
α32,α32,{α32α12α35}
α12α31
α11
α12α31
α11
In[]:=
(*ModelC:Hopfbifurcation(seeAppendixA.2)*)
In[]:=
Hopf1=criticalvalC[[3,1]]/.{RuleEqual}
Out[]=
α32α12α35
In[]:=
eqdb1C=FullSimplify[D[eqb1C,α32]]
Out[]=
α11
α12
′
b1
In[]:=
eqdb2C=FullSimplify[D[eqb2C,α32]]
Out[]=
′
b2
α11(α12α31-2α11α32+α11α12(-1+α35))α40
2
α12
In[]:=
eqdb3C=FullSimplify[D[eqb3C,α32]]
Out[]=
′
b3
2
α11
2
α12
In[]:=
HopfsistemC=Solve[{eqdb1C,eqdb2C,eqdb3C,-X-2*Yb1'[α32],2*λ1*Y+2*b*Zb2'[α32],-b*b*X-2*λ1*b*Zb3'[α32]},{b1'[α32],b2'[α32],b3'[α32],X,Y,Z}]//FullSimplify
Out[]=
[α32]-,[α32]α34,[α32](nα12α34-2α12α31α40+2α11α32α40)α34,Xα34(+)α11(-nα11α12α34+2α11(α12α31-α11α32)α40+(-α12α31+α11(α12+2α32-α12α35))α40λ1+α12α34),Yα11(α12α34+α11(nα12α34-2α12α31α40+2α11α32α40)+(α12α31-2α11α32+α11α12(-1+α35))α40λ1),Z-α11(α11(nα12α34-2α12α31α40+2α11α32α40)λ1+(-α12α31α40+α11(α12+2α32-α12α35)α40+α12α34λ1))
′
b1
α11
α12
′
b2
α11(α12α31-2α11α32+α11α12(-1+α35))α40
2
α12
′
b3
2
α11
2
α12
1
2
α12
2
b
2
λ1
2
λ1
1
2α34(+)
2
α12
2
b
2
λ1
2
b
1
2bα34(+)
2
α12
2
b
2
λ1
2
b
In[]:=
Hopf2=((HopfsistemC[[1,5]]/.{Hopf1/.{EqualRule}})//FullSimplify)/.{RuleEqual}
Out[]=
Y
α11(α34+nα11α34+α40(2α35+α31λ1-α11(2α31+λ1+α35λ1)))
2
b
2
α11
2α12α34(+)
2
b
2
λ1
In[]:=
(*ModelC:Numericalsimulations*)
In[]:=
simulationC1={n0.08,α110.4,α120.8,α400.2,α310.1,α320.08001,α330.1,α340.05,α350.1};
In[]:=
solutionC11=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.5,ϵ[0]0.7}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
solutionC12=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.5,ϵ[0]1}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
solutionC13=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.5,ϵ[0]1.25}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
solutionC14=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.5,ϵ[0]1.5}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
sollC11=solutionC11[[1,1,2]];
In[]:=
solωC11=solutionC11[[1,2,2]];
In[]:=
solϵC11=solutionC11[[1,3,2]];
In[]:=
sollC12=solutionC12[[1,1,2]];
In[]:=
solωC12=solutionC12[[1,2,2]];
In[]:=
solϵC12=solutionC12[[1,3,2]];
In[]:=
sollC13=solutionC13[[1,1,2]];
In[]:=
solωC13=solutionC13[[1,2,2]];
In[]:=
solϵC13=solutionC13[[1,3,2]];
In[]:=
sollC14=solutionC14[[1,1,2]];
In[]:=
solωC14=solutionC14[[1,2,2]];
In[]:=
solϵC14=solutionC14[[1,3,2]];
In[]:=
(*ModelC:2Dand3Dparametricplotswithdifferentinitialvaluesforϵ*)
In[]:=
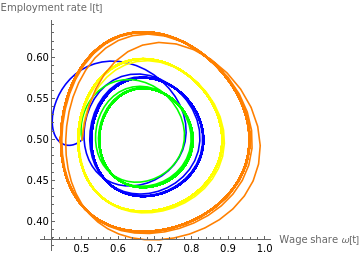
figure4a=ParametricPlot[{{solωC11[t],sollC11[t]},{solωC12[t],sollC12[t]},{solωC13[t],sollC13[t]},{solωC14[t],sollC14[t]}},{t,0,2000},AspectRatio1,AxesLabel{"Wage share ω[t]","Employment rate l[t]"},PlotStyle{Blue,Green,Yellow,Orange},PlotLegends{"ϵ[0]=0.7","ϵ[0]=1","ϵ[0]=1.25","ϵ[0]=1.5"}]
Out[]=
 |
|
In[]:=
figure4b=ParametricPlot3D[{{solωC11[t],sollC11[t],solϵC11[t]},{solωC12[t],sollC12[t],solϵC12[t]},{solωC13[t],sollC13[t],solϵC13[t]},{solωC14[t],sollC14[t],solϵC14[t]}},{t,0,800},AxesLabel{"Wage share ω[t]","Employment rate l[t]","Labour intensity ϵ[t]"},PlotStyle{Blue,Green,Yellow,Orange},PlotRange{{0.3,1},{0.35,0.7},{0.8,1.6}},PlotLegends{"ϵ[0]=0.7","ϵ[0]=1","ϵ[0]=1.25","ϵ[0]=1.5"}]
Out[]=
 |
|
(*ModelC:Alternative3Dparametricplot*)
In[]:=
initialvalC1=Table[{0.5,0.5,x},{x,0.8,1.5,0.025}];
In[]:=
complex3D[eq1_,eq2_,eq3_,t_,ω0_,l0_,ϵ0_,simulation_]:=Block[{ω,l,ϵ},Evaluate[{ω[t],l[t],ϵ[t]}/.NDSolve[{eq1,eq2,eq3,ω[0]ω0,l[0]l0,ϵ[0]ϵ0}/.simulation,{l,ω,ϵ},{t,0,2000}]]]
In[]:=
figure4c=ParametricPlot3D[Evaluate[Table[complex3D[eq[42],eq[43],eq[44],t,x[[1]],x[[2]],x[[3]],simulationC1],{x,initialvalC1}]],{t,0,2000},PlotRange{{0.3,1},{0.35,0.7},{0.8,1.6}},AxesLabel{"Wage share ω[t]","Employment rate l[t]","Labour intensity ϵ[t]"}]
Out[]=

(*ModelC:Trajectories*)
In[]:=
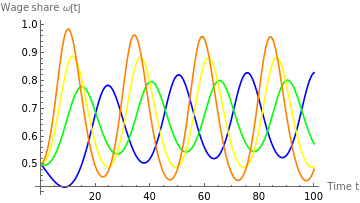
figureB31=Plot[{solωC11[t],solωC12[t],solωC13[t],solωC14[t]},{t,0,100},AxesLabel{"Time t","Wage share ω[t]"},PlotLegends{"ϵ=0.75","ϵ=1","ϵ=1.25","ϵ=1.75"},PlotStyle{Blue,Green,Yellow,Orange}]
Out[]=
 |
|
In[]:=
figureB32=Plot[{sollC11[t],sollC12[t],sollC13[t],sollC14[t]},{t,0,100},AxesLabel{"Time t","Rate of employment l[t]"},PlotLegends{"ϵ=0.75","ϵ=1","ϵ=1.25","ϵ=1.75"},PlotStyle{Blue,Green,Yellow,Orange}]
Out[]=
 |
|
In[]:=
figureB33=Plot[{solϵC11[t],solϵC12[t],solϵC13[t],solϵC14[t]},{t,0,100},AxesLabel{"Time t","Labour intensity ϵ[t]"},PlotLegends{"ϵ=0.75","ϵ=1","ϵ=1.25","ϵ=1.75"},PlotStyle{Blue,Green,Yellow,Orange},PlotRangeAll]
Out[]=
 |
|
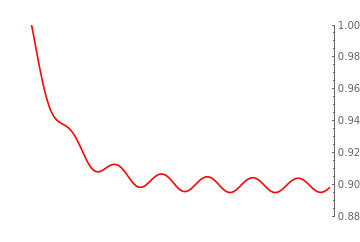
(*ModelC:Stablespiralsforthetrajectoryofthelaborintensity*)
In[]:=
simulationC2={n0.08,α110.4,α120.8,α400.2,α310.1,α320.08001+0.03,α330.1,α340.05,α350.1};
In[]:=
solutionC21=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.5,ϵ[0]1}/.simulationC2,{l,ω,ϵ},{t,0,2000}];
In[]:=
sollC21=solutionC21[[1,1,2]];
In[]:=
solωC21=solutionC21[[1,2,2]];
In[]:=
solϵC21=solutionC21[[1,3,2]];
In[]:=
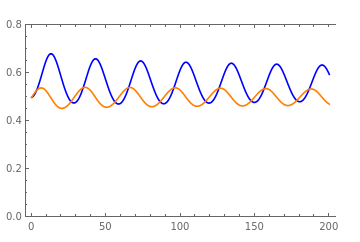
figure5a=Overlay[{Plot[{solωC21[t],sollC21[t]},{t,0,200},AxesLabel{"Time t"},PlotLegends{"Wage share ω[t]","Employment rate l[t]"},PlotStyle{Blue,Orange},PlotRange{0,0.8},Frame{True,True,True,False},ImagePadding25],Plot[{solϵC21[t]},{t,0,200},AxesLabel{"Time t"},PlotLegends{"Labor intensity ϵ[t]"},PlotStyleRed,PlotRange{0.88,1},Frame{False,False,False,True},ImagePadding25,FrameTicks{{None,All},{None,None}}]}]
Out[]=
 |
|
 |
|
In[]:=
initialvalC2=Table[{0.5,0.5,x},{x,0.8,1.5,0.025}];
In[]:=
figure5b=ParametricPlot3D[Evaluate[Table[complex3D[eq[42],eq[43],eq[44],t,x[[1]],x[[2]],x[[3]],simulationC2],{x,initialvalC2}]],{t,0,2000},PlotRange{{0.3,1},{0.35,0.7},{0.8,1.6}},AxesLabel{"Wage share ω[t]","Employment rate l[t]","Labour intensity ϵ[t]"}]
Out[]=

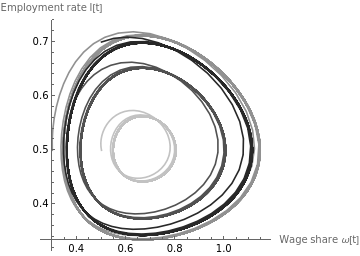
(*ModelC:Limitcycleswithmultipleinitialvaluesforωandl*)
In[]:=
solutionC15=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.5,ϵ[0]1}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
solutionC16=NDSolve[{eq[42],eq[43],eq[44],l[0]0.5,ω[0]0.3,ϵ[0]1}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
solutionC17=NDSolve[{eq[42],eq[43],eq[44],l[0]0.6,ω[0]0.4,ϵ[0]1}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
solutionC18=NDSolve[{eq[42],eq[43],eq[44],l[0]0.7,ω[0]0.5,ϵ[0]1}/.simulationC1,{l,ω,ϵ},{t,0,2000}];
In[]:=
sollC15=solutionC15[[1,1,2]];
In[]:=
solωC15=solutionC15[[1,2,2]];
In[]:=
solϵC15=solutionC15[[1,3,2]];
In[]:=
sollC16=solutionC16[[1,1,2]];
In[]:=
solωC16=solutionC16[[1,2,2]];
In[]:=
solϵC16=solutionC16[[1,3,2]];
In[]:=
sollC17=solutionC17[[1,1,2]];
In[]:=
solωC17=solutionC17[[1,2,2]];
In[]:=
solϵC17=solutionC17[[1,3,2]];
In[]:=
sollC18=solutionC18[[1,1,2]];
In[]:=
solωC18=solutionC18[[1,2,2]];
In[]:=
solϵC18=solutionC18[[1,3,2]];
In[]:=
figure6=ParametricPlot[{{solωC15[t],sollC15[t]},{solωC16[t],sollC16[t]},{solωC17[t],sollC17[t]},{solωC18[t],sollC18[t]}},{t,0,2000},AspectRatio1,AxesLabel{"Wage share ω[t]","Employment rate l[t]"},PlotStyle{GrayLevel[0.76],GrayLevel[0.57],GrayLevel[0.32],GrayLevel[0.16]},PlotLegends{"ω[0]=0.5, l[0]=0.5, ϵ[0]=1","ω[0]=0.3, l[0]=0.5, ϵ[0]=1","ω[0]=0.4, l[0]=0.6, ϵ[0]=1","ω[0]=0.5, l[0]=0.7, ϵ[0]=1"}]
Out[]=
 |
|
(*****************************************************************)(*****************************ModelD****************************)(*****************************************************************)
In[]:=
caseD={s1,h1,δ0,ρ0,q[t]α40*ϵ[t]*m[t],q'[t]α40*(ϵ'[t]*m[t]+ϵ[t]*m'[t]),m'[t]m[t]*γm};
In[]:=
eq[48]=FullSimplify[Solve[({eq[25],eq[26],eq[27]}/.caseD)/.caseD,{l'[t],ω'[t],ϵ'[t]}]][[1]]/.{RuleEqual}
Out[]=
[t]l[t](-α21+n(-1+α23+α13α23(-1+α35))-γm+α23(α11+α31-α11α35+(2+α33+α13(-1+α35))γm)-α23(α12+α32-α12α35)l[t]+ϵ[t](α40-α23(α34+α40+α13(-1+α35)α40)+(-1+α23+α13α23(-1+α35))α40ω[t])),[t]-ω[t](-α11(1+α22-α23)(-1+α35)+(1+α22-α23)(α31+γm+α33γm)-α13(-1+α35)(α21-α22(n+γm))-(1+α22-α23)(α12+α32-α12α35)l[t]-α34ϵ[t]+ϵ[t](α23α34-α22(α34+α13(-1+α35)α40)+α13α22(-1+α35)α40ω[t])),[t]ϵ[t]((1+α22+(-1+α13)α23)α31-(α13(α21-nα22)+α11(1+α22-α23))α35+(1+α22+(-1+α13)α23)α33γm+α13(α22+α23)α35γm-((1+α22+(-1+α13)α23)α32+α12(-1-α22+α23)α35)l[t]-ϵ[t]((1+α22+(-1+α13)α23)α34+α13α22α35α40-α13α22α35α40ω[t]))
′
l
1
1+α22+α23(-1+α13-α13α35)
′
ω
1
1+α22+α23(-1+α13-α13α35)
′
ϵ
1
1+α22+α23(-1+α13-α13α35)
(*ModelD:Equilibrium*)
In[]:=
{eq[49],eq[50],eq[51]}=FullSimplify[Solve[eq[48]/.{l'[t]0,ω'[t]0,ϵ'[t]0},{l[t],ω[t],ϵ[t]}]][[4]]/.{RuleEqual}
Out[]=
l[t],ω[t](α12α21α34-nα12(-1+α23)α34+α32α40(α11+α13α21-α11α23+γm-α23γm)+α12(-1+α23)(-α34γm+α40(α31+(α33+α35)γm)))(α40(α32(α11+α13α21-α11α23+γm-α23γm)+α12(-1+α23)(α31+(α33+α35)γm))),ϵ[t]
α11+α13α21-α11α23+γm-α23γm
α12-α12α23
α31+
-α11α32+-α32γm+α12(α33+α35)γm
α13α21α32
-1+α23
α12
α34
(*ModelD:Stabilityanalysisusingnumericalsimulations*)
In[]:=
simulationD1={n0.08,γm0,α110.4,α120.8,α400.2,α210.01,α220.1,α230.1,α310.1,α330.1,α340.05,α350.1,α13α13,α32α32};
In[]:=
jacobianD=D[{eq[48][[1,2]],eq[48][[2,2]],eq[48][[3,2]]},{{l[t],ω[t],ϵ[t]}}]/.({eq[49],eq[50],eq[51]}/.{EqualRule})//FullSimplify;
In[]:=
jacobianD1=(jacobianD/.simulationD1)//FullSimplify;
In[]:=
eqb1D=b1[α32](-Tr[jacobianD1]//FullSimplify);
In[]:=
eqb2D=b2[α32](Tr[Minors[jacobianD1]]//FullSimplify);
In[]:=
eqb3D=b3[α32](-Det[jacobianD1]//FullSimplify);
In[]:=
eqb123D=b1[α32]*b2[α32]-b3[α32]((eqb1D[[2]]*eqb2D[[2]]-eqb3D[[2]])//FullSimplify);
In[]:=
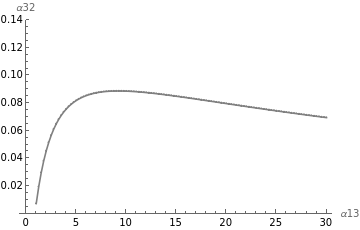
fcriticalvalD[valα13_]:={valα13,If[Solve[(eqb123D[[2]]/.{α13valα13})0,α32][[1,1,2]]>0,Solve[(eqb123D[[2]]/.{α13valα13})0,α32][[1,1,2]],Solve[(eqb123D[[2]]/.{α13valα13})0,α32][[2,1,2]]]}
In[]:=
figure8=ListLinePlot[Table[fcriticalvalD[x],{x,1,30,0.25}],PlotMarkers{Automatic,4},PlotRange{0,0.14},AxesLabel{"α13","α32"},PlotStyleGray]

Out[]=
(*ModelD:Simulationsand3Dparametricplot*)
In[]:=
simulationsD=Table[{n0.08,γm0,α110.4,α120.8,α400.2,α210.01,α220.1,α230.1,α310.1,α330.1,α340.05,α350.1,α13x,α32fcriticalvalD[x][[2]]},{x,1.5,16,0.25}];
In[]:=
figure7=Show[ParametricPlot3D[Evaluate[Table[complex3D[eq[48][[1]],eq[48][[2]],eq[48][[3]],t,0.5,0.5,1,x],{x,simulationsD}]],{t,0,2000},PlotRange{{0,1},{0,1},{0.5,2}},AxesLabel{"Wage share ω[t]","Employment rate l[t]","Labour intensity ϵ[t]"}],Graphics3D[{PointSize[0.02],Black,Point[{0.5,0.5,1}]}]]
Out[]=

Cite this as: John Cajas Guijarro, Leonardo Vera, "The Macrodynamics of an Endogenous Business Cycle Model of Marxist Inspiration" from the Notebook Archive (2022), https://notebookarchive.org/2022-07-b3n4804
Download
